☆ Yσɠƚԋσʂ ☆@lemmy.ml to Technology@lemmy.mlEnglish · 4 months agoMushroom learns to crawl after being given robot bodywww.independent.co.ukexternal-linkmessage-square19fedilinkarrow-up148arrow-down11cross-posted to: mycology@mander.xyztech@programming.devtechnology@lemmy.worldtenforward@lemmy.worldandfinally@feddit.uk
arrow-up147arrow-down1external-linkMushroom learns to crawl after being given robot bodywww.independent.co.uk☆ Yσɠƚԋσʂ ☆@lemmy.ml to Technology@lemmy.mlEnglish · 4 months agomessage-square19fedilinkcross-posted to: mycology@mander.xyztech@programming.devtechnology@lemmy.worldtenforward@lemmy.worldandfinally@feddit.uk
minus-squareBonfireOvDreams@lemmy.mllinkfedilinkEnglisharrow-up1·4 months agoThey are designing the chip of the robot to adjust movement based on information they can gather from the mushroom when it responds to stimuli, not the other way around. The mushroom is not in control of the robot.

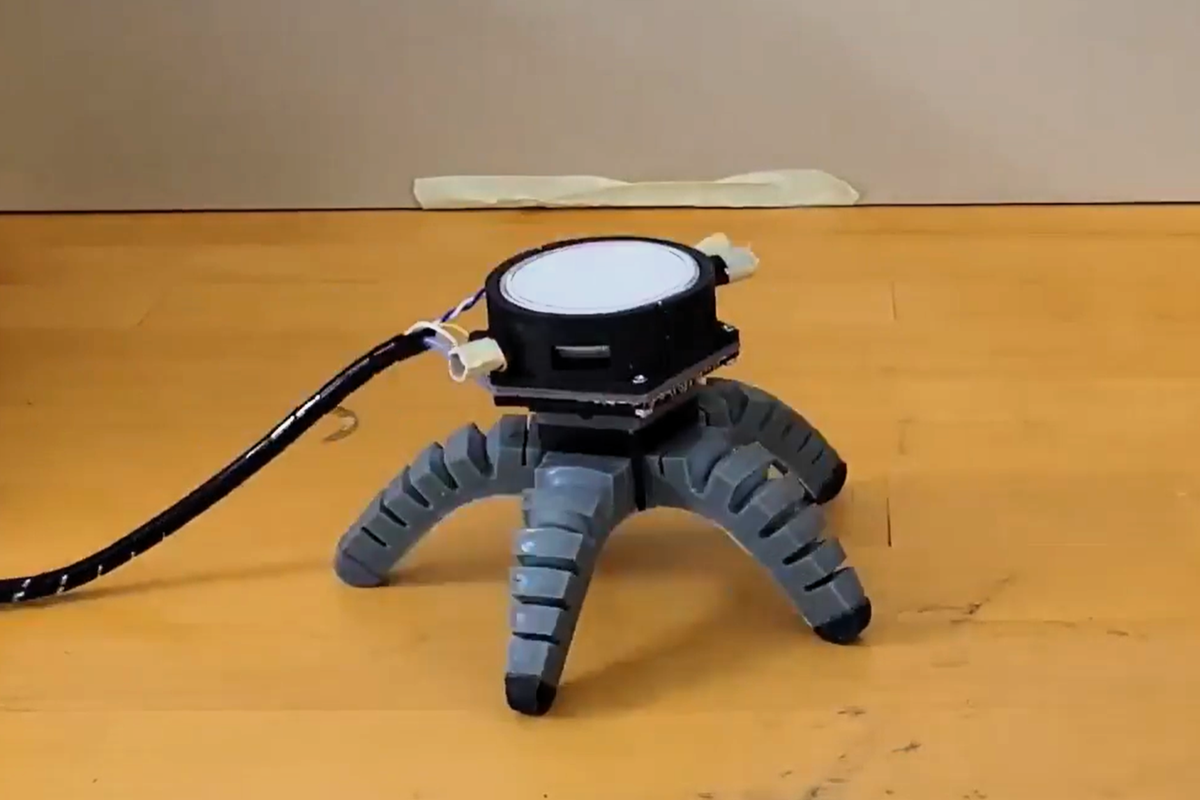
They are designing the chip of the robot to adjust movement based on information they can gather from the mushroom when it responds to stimuli, not the other way around. The mushroom is not in control of the robot.